Kuinka usein näitä päivityksiä tulee? Tuntuu että parin kuukauden välein sama homma.
Onhan noita isoja arkkitehtuurimuutoksia ollut matkan varrella. Koko ajan pienempää muutosta, isot arkkitehtuurivaihdokset vuosien välein.
Mobileye ratkaisu alunperin mistä siirryttiin teslan omaan rautaan ja kokonaan omaan softaan.
FSD yritti tunnistaa yksittäisistä kuvista pyöräilijät, autot, kävelijät, kaistat jne. C++ kontrollikoodi ajaa tunnistuksien pohjalta. Jokainen kamera erikseen, ei yhtenäistä 3d avaruutta. Ongelmia esim. jos kohde siirtyy katvealueelle tai kamerasta toiseen. Iso osa koodista ihmisen kovakoodaamaa heuristiikkaa ja lähinnä erilaiset kohteiden, tien yms. tunnistukset neuroverkoilla.
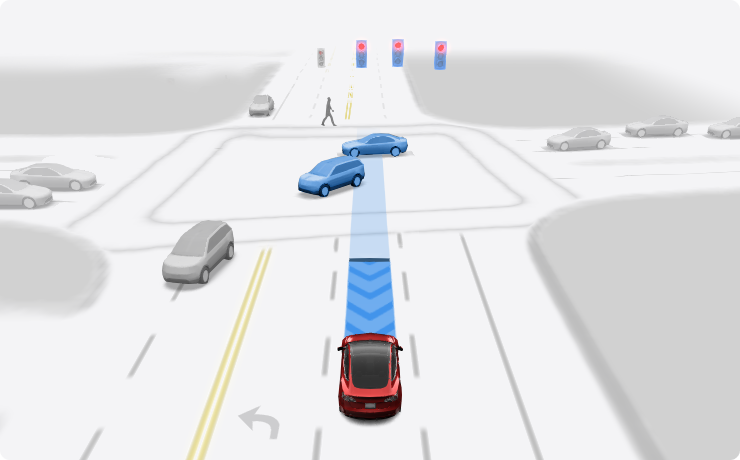
Occupancy network + kaikkien kameroiden integroiminen vector spaceen missä tunnistetaan ajettava 360 3d tila vaikka ei tiedettäisi onko este paloposti, tötterö tms. Yhtenäinen 3d tila missä käytetään kaikkia kameroita yhdessä eikä joka kameraa erikseen. Tän piti ratkaista kaikki ongelmat, mutta ei ratkaissutkaan. Occupancy network NeRFs pohjainen härdelli missä neuroverkolla voidaan luoda kameroiden antamista kuvista 3d maailma. Uusi parkkeeraus visulisaatio näyttää mitä occupancy network näkee.
FSD 12:ssa korvataan ihmisen tekemä c++ koodi neuroverkolla. Ennen tehtiin kontrollipäätökset c++ kovakoodatulla heuristiikalla, fsd 12:ssa videoilla opetettu neuroverkko korvaa 300k+ riviä c++ koodia. Tän pitäisi ratkaista c++ koodin heikkoudet kontrollilogiikassa, mutta tuskin ratkaisee kaikkia ongelmia. Neuroverkko ajaa vain yhtä hyvin kuin data mitä on opettamisessa käytetty sallii.
Tuossa noita korkealla tasolla mitä on pinossa tapahtunut vuosien varrella. Paljon puuttuu ylläolevasta dataa, kun teslalla oli alunalkaen paljon c++ koodia ja sitä koodia on muutettu neuroverkkopohjaiseksi vuosien saatossa. Yksi iso juttu on saman pinon käyttäminen pienemmille teille ja moottoriteille. Tän piti nopeuttaa kehitystyötä, kun yksi toteutus tekee "kaiken" versus ylläpidä ja kehitä kahta eri ratkaisua.
Jos saa arvata niin seuraava innovaatio on joku "parempi neuroverkko", joka korjaa fsd12 neuroverkkojen ongelmat mutta ei korjaakkan kaikkia ongelmia vaan vain osan niistä.
 www.is.fi
www.is.fi