Alkaispa tuo bensaleikkurin perässä käveleminen piisaamaan.
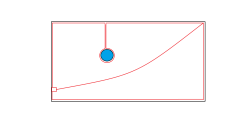
Liitteen mukainen alue ois mitä sillä leikata. 490 m2 google earthin mukaan miinus tuo vaja, joka ehkä noin 12 m2.
Lähinnä mietityttää tuo tuolla ylhäällä oleva kapea alue. Onko liian kapea roboteille, noin 1,5 metriä leveä. Saako robotti hoidettua senkin?
Toki ruoho ei paljon yhtään tuolla alueella kasva, kun on koko päivän varjossa nuo alueet.
Hakulangalla varmaan pystysi ohjaamaan leikkurin tuonne?
Onko normaalin ruohonleikkurin voinut heittää menemään robotin hankkimisen jälkeen?
Ja eikö leikkurin valinta mene suoraan neliöiden mukaan? Ei kannata hommata ns. isommalla neliömäärällä olevaa "varalta".
Tämmöistä olen toistaiseksi katsellut, saa ehdottaa mikäli teidän mielestänne joku on parempi.
Gardena Sileno minimo 500 on hiljainen, monipuolinen ja kompakti robottiruohonleikkuri. Sileno minimo on ihanteellinen valinta pienille nurmikoille, sillä siinä yhdistyvät hyvä suorituskyky ja ketterä leikkaaminen. Leikkuri sopii enintään 500 m² nurmialueen leikkaamiseen. Kun otat esiin...

www.bauhaus.fi
Robomow oli ilmeisesti voittanut kuluttajalehden testin, mutta onko RT-malli verrattavissa yhtään RK-malleihin.
")